Soumis par Colin le sam, 10/12/2016 - 00:23
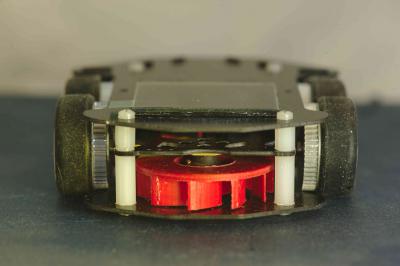
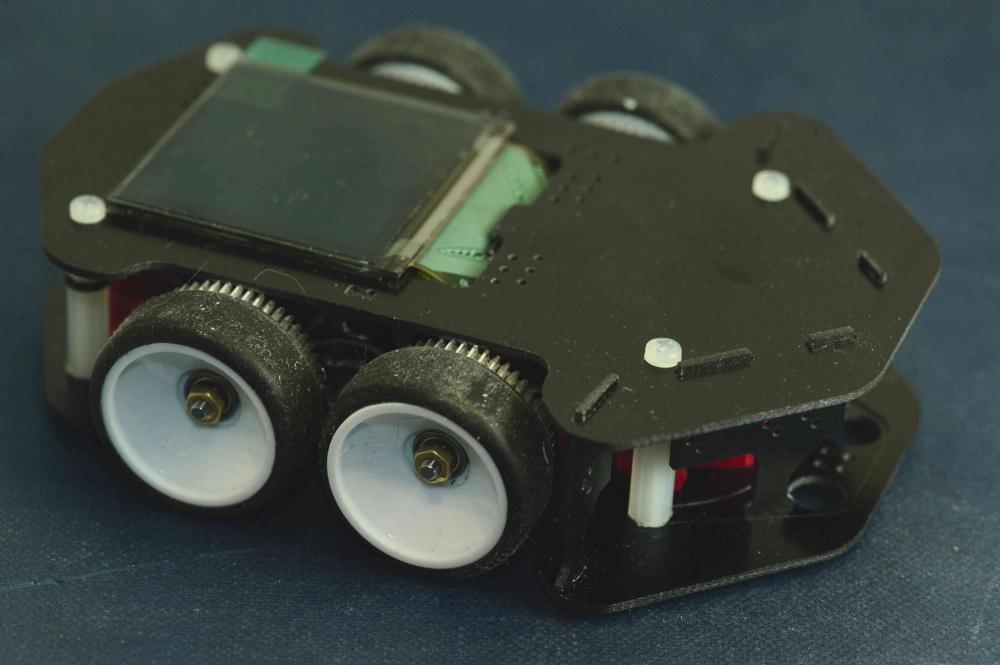
Voici les photos de la deuxième maquette de Zhonx IV.
Sur cette nouvelle version nous avons mis en oeuvre le système de
tenon-mortaise.
Les pièces sont en FR4 (fibre de verre) découpées à la CN.

Soumis par preybaud le dim, 27/11/2016 - 00:07
La solution entretoise/vis pour l'assemblage de ZHONX IV pose plusieurs problèmes :
- Pièces supplémentaires
- Nous ne trouvons pas forcément dans le commerce les bonnes longueurs, il faut ajuster
- Les entretoises nylon sont flexibles
Pour ZHONX III les flancs du robot tenaient le PCB grace à un système de tenon mortaise chevillé, nous en étions très satisfaits.
Soumis par preybaud le dim, 13/11/2016 - 00:18
Cela fait maintenant cinq ans que le projet ZHONX à vu le jour. ZHONX IV marque un tournant dans notre technologie, c'est un projet extrèmement ambitieux qui a pour but de placer notre équipe au niveau mondial.
carracteristiques :
- Poids inférieur à 120g (adaptateur bluetooth amovible)
- Longueur max 97mm
- Largeur max 70mm
- Hauteur max 24mm
- Propulsion FAULHABER 1717SR (6v)+ IE2-512
- Aspiration centrifuge 1000g (sans écoulements)
- Jantes avant Mini Z 3° (déport de 3mm) PVC (conception maison)
Soumis par preybaud le sam, 12/11/2016 - 19:52
Voici la première maquette de Zhonx IV :